
به تازگی پژوهشگران فعال در شرکت گوگل موفق به طراحی یک دست رباتیک جدید شدهاند که بر اساس هوش مصنوعی کار میکند و قادر است حرکات دست انسان هنگام تعامل با اشیا را تقلید کرده و تعدادی از آنها را بازسازی کند.
دست رباتیک گوگل توسط تیم مغز این شرکت طراحی شده است. تیم مغز گوگل در عمل یک تیم تحقیقاتی به شمار میرود که فعالیت اعضای آن بر مطالعهی عمیق هوش مصنوعی تمرکز یافته است. در واقع اعضای این تیم تحقیقات بیپایان خود در حوزهی فراگیری ماشین را با مهندسی سیستم ترکیب میکنند تا بتوانند به نتایج تازهای در تولید تکنولوژیهای نوین دست یابند.
با توجه به آناتومی دست انسان، ارتباط دست با اشیا و تاثیرگذاری بر آنها فعالیت کاملا سادهای به نظر میرسد. فعالیتی که البته برای یک ربات چندان ساده محسوب نمیشود. به این دلیل که برای انجام فعالیتهایی نظیر نوشتن روی کاغذ نیاز به وجود مدلهای فیزیکی کارامدی خواهد بود که بتوانند حرکات و نیروهای لازم را به شکل مستقیم بر جسم مورد نظر اعمال کنند. البته در عین این که تماس و ارتباط را به شکل پیوسته با هدف مورد نظر برقرار و قطع میسازند. معمولا مدلهایی که بر اساس این قابلیت ساخته میشوند از چالاکی و مهارتی مشابه با حرکات دست انسان برخوردار نیستند و دقت پایینتری را نسبت به حرکات واقعی دست به نمایش میگذارند.
با این حال دست رباتیک گوگل توانسته است تا حدی بر این چالش غلبه کند و وظایف تعیین شده توسط طراحان را به خوبی انجام دهد. آن هم بر اساس حجم نه چندان بالای اطلاعاتی که در اختیارش قرار گرفته است. این دست مصنوعی که مبتنی بر هوش مصنوعی طراحی شده است از وجود تکنیک مدلهای پویای ژرف برای یادگیری مهارتهای دستکاری طبیعی اجسام بهره میبرد. تکنیکی که هماکنون توسط پژوهشگران شرکت گوگل در حال توسعه است. استفاده از تکنیک یاد شده موجب شده است تا دست رباتیک گوگل با استفاده از تنها چهار ساعت اطلاعات جمعآوری شده از دنیای واقعی بتواند با اجسام ارتباط برقرار کند و بر آنها تاثیر بگذارد.
دست رباتیک گوگل از نوع دستهای مصنوعی طبیعی است که با نام دست سایه شناخته میشوند و قادر به تقلید و بازسازی حرکات دست انسان به شکل ماهرانهای هستند. این دست مصنوعی از یک مچ برخوردار بوده که از وجود دو مفصل فعال بهره میبرد. علاوه بر آن انگشتان حلقه و میانی این دست دارای سه مفصل فعال و یک مفصل کم تحرک هستند. البته انگشت شست و انگشت کوچک این دست مصنوعی از مفاصل بیشتری برخوردارند و پنج مفصل فعال در آنها تعبیه شده است.
پژوهشگران برای آزمایش دست رباتیک گوگل و سنجش میزان توانایی آن در تعامل با اجسام، وظایفی را برای آن تعیین نمودند که تمام آنها مبتنی بر تعامل با اجسام مختلف بود. به گونهای که برای انجام وظایف مذکور دست مصنوعی گوگل باید با اجسام مورد نظر ارتباط برقرار مینمود و آنها را به سمت اهداف تعیین شده هدایت میکرد.
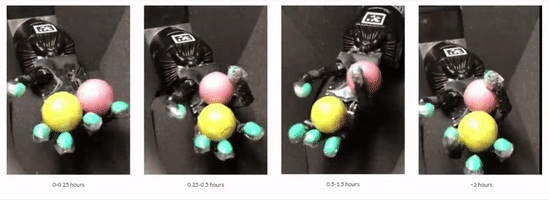
یکی از دشوارترین چالشهایی که برای دست رباتیک گوگل در نظر گرفته شده بود به چرخش همزمان دو توپ جداگانه در کف دست اختصاص داشت. البته به گونهای که این دو توپ در حین چرخش رها نشوند و همچنان توسط دست مصنوعی گوگل نگه داشته شده و مورد چرخش قرار بگیرند. با وجود دشوار بودن این چالش برای یک مدل مصنوعی، دست رباتیک گوگل به خوبی از پس انجام آن بر آمد. آن هم در شرایطی که تنها صد هزار نقطه اطلاعات را به عنوان دادههای ورودی دریافت کرده بود. رقمی که حدود ۲٫۷ ساعت ارزش اطلاعات را شامل میشود.

در یک آزمایش جداگانه پژوهشگران گوگل مدل طراحی شده توسط خود را در چالشهای دیگری مورد بررسی قرار دادند. چالشهایی که این مدل مصنوعی برای انجام آنها تمرین یا آزمایش اضافهای را انجام نداده بود. به عنوان مثال دست مصنوعی گوگل انجام حرکت در خلاف جهت عقربههای ساعت را آموخته بود. حال آن که در این آزمایش مجاب شد تا در جهت عقربههای ساعت حرکت کند. همچنین حمل توپ به یک نقطهی از پیش تعیین شده نیز یکی دیگر از آزمایشهایی بود که دست رباتیک گوگل به خوبی از پس انجام آن بر آمد.
البته این برای نخستین بار نیست که چنین مدلی با مشخصات یاد شده ساخته میشود. اندکی قبل پژوهشگران فعال در شرکت چینی تنسنت نیز موفق به ساخت یک دست رباتیک شده بودند. تخصص اصلی دست مصنوعی پنج انگشتی ساخته شده توسط پژوهشگران چینی در کار با مکعب روبیک و تکمیل معماهای مربوط به آن بود. در مجموع این دست مصنوعی در ۱۴۰۰ تلاش مجزا برای حل معماهای مربوط به مکعب روبیک موفق شد نرخ ۹۰ درصد تلاش موفقیتآمیز را به نام خود ثبت کند.
تقریبا همزمان با شرکت تنسنت پژوهشگران فعال در شرکت OpenAI نیز موفق به ساخت یک دست رباتیک شدند. مدلی که قادر است اجسام گوناگون را به شکل کاملا ظریف و طبیعی بردارد و به تعامل با آنها بپردازد.
در کنار مواردی که به آنها اشاره شد سال گذشته پژوهشگران دانشگاه ام آی تی اقدام به طراحی یک سیستم کامپیوتری نوین کردند. سیستمی که به رباتها اجازه میدهد اجسامی که تا پیش از این هرگز ندیدهاند را در عین مشاهده، بشناسند و به برقراری ارتباط با آنها بپردازند.

پیش از آن که شرکت گوگل بخواهد اقدام به طراحی دست رباتیک جدید خود بکند در همکاری با دانشگاه ام آی تی و پرینستون رباتی را طراحی کرده بود که میتوانست اجسام را بردارد و آنها را به درون یک جعبه پرتاب کند.
طراحی چنین مدلهایی میتواند در ترکیب قابلیتهای مربوط به تکنولوژیهای مبتنی بر مدل با تکنولوژیهایی که تنها متکی بر سیستم فراگیری ماشین بوده و از وجود مدل بینیاز هستند، بسیار مفید و موثر باشد. تکنولوژیهای مبتنی بر سیستم فراگیری ماشین و بینیاز از مدل با وجود آن که بازدهی مناسبی در زمینهی اجرای کم نقص وظایف پیچیده دارند، اما نیاز به دریافت حجم فراوانی از اطلاعات دارند و در عین حال هنگامی که انعطاف بالا از آنها انتظار میرود با چالشهای اساسی مواجه میشوند. از همین رو توسعهی تکنولوژیهای مبتنی بر مدل امری ضروری به نظر میرسد.
در پایان باید به این موضوع اشاره کرد که پژوهشگران گوگل قصد دارند به زودی کدهای مربوط به فعالیتهای اخیر خود را به شکل منبع باز در اختیار افراد علاقهمند قرار دهند.
























دیدگاه ها